JA
Login- English
- Čeština
- Español
- Italiano
- Deutsch
- Polski
- Français
- Home
- キャリブレーション
- 高度なキャリブレーション
- エクストルーダーのリニアリティ補正キャリブレーション
エクストルーダーのリニアリティ補正キャリブレーション
Menu
This article is also available in following languages: 






これは 高度なキャリブレーションですので、経験豊富なユーザーにのみお勧めします。
このキャリブレーションは、ファームウェアバージョン3.2.0以降でのみ機能します。
リニアリティ補正は、カスタム電流波形の定義を可能にするTrinamicステッピングモータードライバーの機能を使用しています。 デフォルトのTrinamic波形は正弦波ですが、実際の波形は少し異なる場合があり、ステッピングモーターのタイプによって異なります。 また、同じタイプのモーターは異なる波形を持つことができます。 歪みが最大になるのは、波形がゼロクロスするとき(またはその周辺)なので、元の正弦波は、この歪みを除去するように、べき関数を使用して変更されます。
リニアリティ補正キャリブレーションの手順
- プリンターのLCDメニュー -> Settings -> E-Correctを選びOFFにします。
- Calibration Gcodeをダウンロードしてプリントします。
- タワーに斜めのモアレ線が現れるのがわかると思います。 キャリブレーションオブジェクトの表面が最適な場所を見つけます。
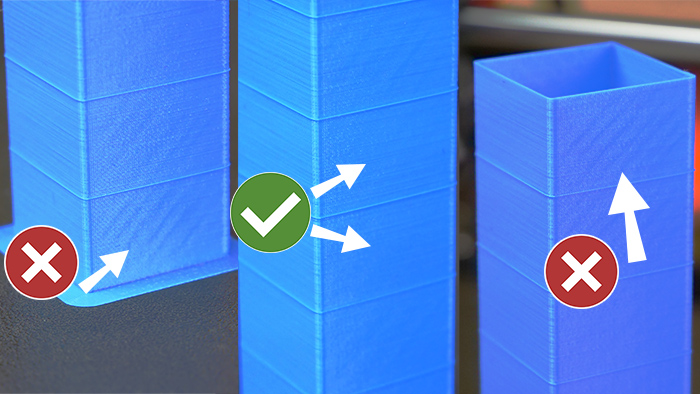
特に暗い反射として見える45度の線に注目します
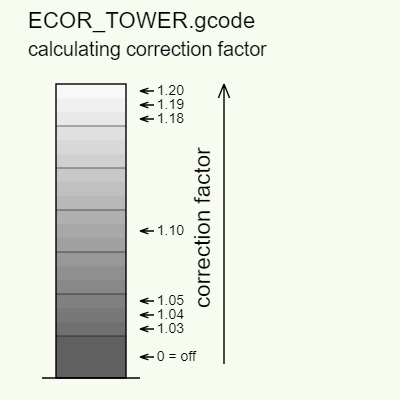
- ほとんどのプリンタでは、オブジェクトの垂直方向の中心(値1.10)付近の歪みが最小となりますが、お使いのプリンタでは異なる場合があります。 理想的な値に注意してください。
- E-correction 再び有効にします LCDメニュー -> Settings -> E-Correct. 満足のいく値に調整します。
ファームウェア3.13.0 以降では、補正係数のメニュー番号の付け方に変更があり、0から200までとなっています。
対応関係は以下の通り:
補正係数1.03は、メニューでは030と表示されます。
補正係数1.11は、メニューでは110と表示されます。 - 何か適当なものをプリントして、対角線がまだ現れるかどうかを確認します。あるばあいは手順3に戻ってください。
キャリブレーションオブジェクトの GitHub ページ- ECOR_TOWER
Was this article helpful?
Comments


Still have questions?
If you have a question about something that isn't covered here, check out our additional resources.
And if that doesn't do the trick, you can send an inquiry to [email protected] or through the button below.