Die Linearitätskorrektur basiert auf der Trinamic-Schritttreiber-Funktion, die die Definition einer kundenspezifischen Strom-Wellenform ermöglicht. Die Standard-Trinamic-Wellenform ist eine Sinusfunktion, aber die tatsächliche Wellenform kann etwas anders sein und hängt vom Schrittmotortyp ab. Außerdem können Motoren desselben Typs unterschiedliche Wellenformen haben. Die größte Verzerrung tritt auf, wenn die Welle den Nullpunkt durchläuft (oder um ihn herum), daher wird die ursprüngliche Sinuswelle mit Hilfe der Leistungsfunktion modifiziert, um diese Verzerrung zu eliminieren.
Linearitätskorrektur-Kalibrierverfahren
- Gehen Sie zum LCD-Menü -> Einstellungen -> Lin.Korr. -> E-Korrekt, und schalten Sie es dann aus
- Herunterladen und drucken Sie den Calibration g-code
- Sie werden feststellen, dass auf dem Turm einige diagonale Moire-Linien erscheinen werden. Finden Sie eine Stelle mit der besten Oberfläche auf dem Kalibrierobjekt.
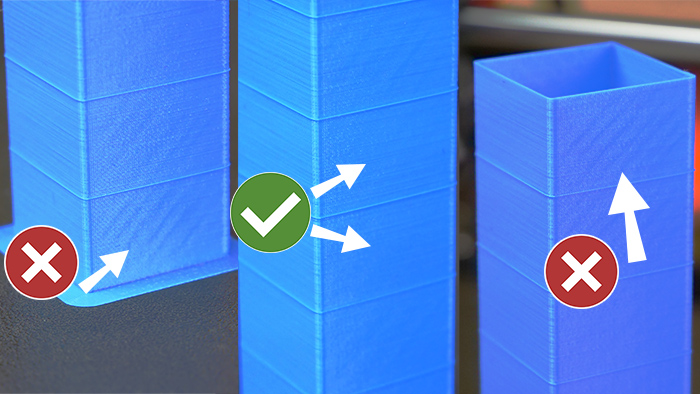
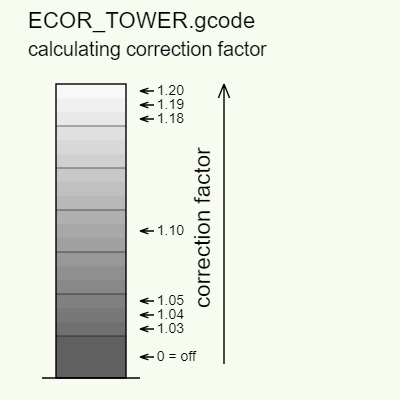
- Die meisten Drucker haben eine minimale Verzerrung um die vertikale Mitte des Objekts (Wert 1,10), aber Ihre könnte anders sein. Notieren Sie Ihren Idealwert.
- Aktivieren Sie die E-Korrektur erneut in LCD-Menü -> Einstellungen -> Lin.Korr. -> E-Korrek. Stellen Sie den Wert auf den ein, mit dem Sie zufrieden waren.
In Firmware 3.13.0 und neuer hat sich die Nummerierung des Menüs für den Korrekturfaktor geändert, die von 0 bis 200 reicht.
Das entspricht folgendermaßen:
Korrekturfaktor 1.03 wird im Menü als 030 dargestellt.
Korrekturfaktor 1.11 wird im Menü als 110 dargestellt. - Drucken Sie etwas aus und prüfen Sie, ob die diagonalen Linien noch vorhanden sind. Wenn ja, gehen Sie bitte zurück zu Schritt 3.